Method Overview
@misc{zhao2025resmimicgeneralmotiontracking,
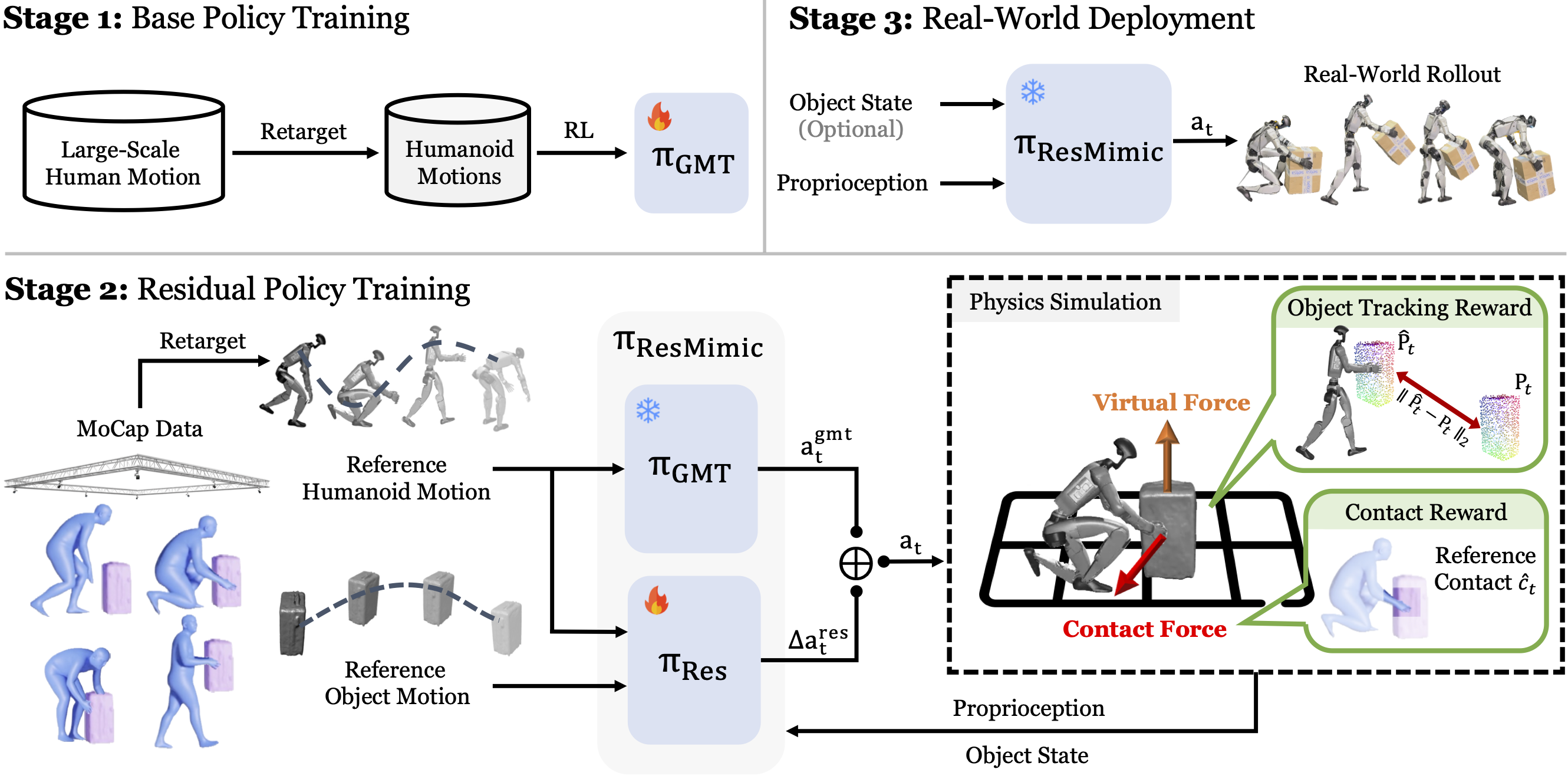
title={ResMimic: From General Motion Tracking to Humanoid Whole-body Loco-Manipulation via Residual Learning},
author={Siheng Zhao and Yanjie Ze and Yue Wang and C. Karen Liu and Pieter Abbeel and Guanya Shi and Rocky Duan},
year={2025},
eprint={2510.05070},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2510.05070},
}